กำเนิดอาซิโม พ.ศ. 2543
สู่ศตวรรษที่ 21 โลกแห่งเทคโนโลยีอันไร้ขีดจำกัด
จากความสำเร็จในการสร้างหุ่นยนต์
P2 และ P3 ซึ่งเป็นหุ่นยนต์เดินสองขาของฮอนด้า
แสดงให้เห็นถึงการก้าวเข้าสู่ความท้าทายของการเคลื่อนไหวด้วยตัวเอง
การใช้ความรู้ที่ได้มาจากการพัฒนาและค้นคว้าวิจัยหุ่นยนต์รุ่นต้นแบบ
ได้ถูกนำมาใช้เพื่อสร้างเทคโนโลยีใหม่ที่สามารถนำมาใช้ในงานได้จริง
ซึ่งอาซิโม คือผลสำเร็จของการพัฒนานี้
ออกแบบเพื่อให้ทำงานได้ในโลกของเรา
อาซิโมมี 2 แขน 2 ขา และนี่เองที่ทำให้ถูกเรียกว่าเป็นหุ่นยนต์คล้ายมนุษย์
อาซิโมเป็นที่รู้จักกันดีว่าเป็นหุ่นยนต์ตัวเดียวในโลกที่มีความคล้ายมนุษย์
สามารถเดินได้อย่างอิสระและขึ้นบันไดได้
ซึ่งนับเป็นสิ่งสำคัญเพราะบนโลกเรานี้มีพื้นที่ที่เป็นขอบสูง
พื้นผิวไม่สม่ำเสมอ มีสิ่งกีดขวาง และขั้นบันได
ความสามารถที่สมบูรณ์แบบนี้จะเป็นพื้นฐานสำคัญที่จะช่วยให้อาซิโมสามารถทำงานต่าง
ๆ ได้ง่ายขึ้น และเป็นผู้ช่วยมนุษย์ได้อย่างแท้จริง
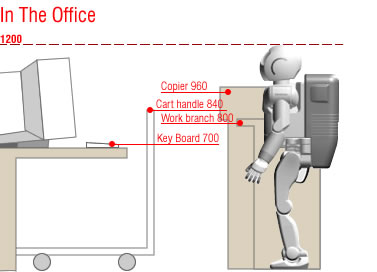
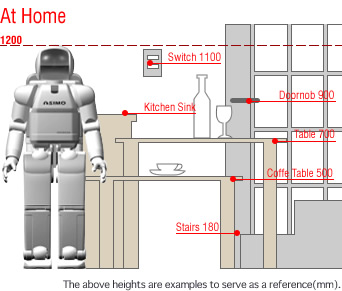
แนวความคิดด้านการออกแบบ
ขนาดของอาซิโมได้ถูกกำหนดให้สามารถทำงานได้สะดวกในชีวิตประจำวัน
และผูกพันฉันท์มิตรกับมนุษย์ ขนาดของอาซิโมทำให้อาซิโมสามารถเปิดปิดสวิทช์
เปิดประตู และทำงานที่โต๊ะได้
ระดับสายตาของอาซิโมจะอยู่ในระดับเดียวกันกับตาของมนุษย์ขณะที่กำลังนั่งบนเก้าอี้
ความสูงที่ 120 เซนติเมตรนั้นยังง่ายต่อการสื่อสารอีกด้วย
การเดินที่นุ่มนวลและมั่นคงมากขึ้น
เทคโนโลยีใหม่ ซึ่งเรียกว่า “i-WALK เทคโนโลยี”
ทำให้อาซิโมเดินได้อย่างต่อเนื่องในขณะเปลี่ยนทิศทางการเดิน i-WALK
ยังทำให้อาซิโมทรงตัวได้ดียิ่งขึ้นเมื่อต้องเคลื่อนไหวในทันที
ในขณะที่หุ่นยนต์ในระยะเริ่มแรกจนถึงหุ่นยนต์รุ่น P3
การเคลื่อนไหวจะดูเชื่องช้า
เพราะว่าต้องหยุดเล็กน้อยในขณะเปลี่ยนทิศทางการเดิน
ทั้งยังไม่สามารถปรับเปลี่ยนระยะเวลาในการเดินต่อก้าวให้เข้ากับการเดินในแต่ละแบบได้มากนัก
การก้าวเดินในแบบเดิมนั้น
หุ่นยนต์จะยกเท้าขึ้นโดยให้นิ้วเท้าชี้ขึ้นแล้ววางเท้าลงบนพื้นด้วยส้นเท้า
ในการเดินเป็นเส้นตรง หุ่นยนต์จะต้องเดินตามตามลำดับแบบการเดินดังนี้ คือ
เดินด้วยอัตราเร่ง เดินด้วยความเร็วคงที่ และชะลอความเร็วของการเดิน
ซึ่งข้อมูลการเดินทั้งสามแบบการเดินนี้ถูกบันทึกแบบอนุกรมเวลา
ส่วนการหมุนตัวหรือการเปลี่ยนทิศทางการเดินนั้น
ทำได้โดยการนำข้อมูลจากการหมุนตัวของการเดินหลายๆ แบบมารวมกัน
แล้วบันทึกเป็นอนุกรมเวลา เช่น P3 นำข้อมูลการเดินหมุนตัว 20 องศา และ 40
องศา มารวมกันเพื่อให้ได้การเดินหมุนตัว 30 องศา
เทคโนโลยีการควบคุมการเคลื่อนด้วยวิธีคาดการณ์ของการเดินแบบ
i-WALK ได้ถูกเพิ่มเติมเข้าไปในการควบคุมการเดินแบบเดิม
ทำให้อาซิโมมีความหลากหลายในรูปแบบการเดินมากขึ้น
เดินได้อย่างนุ่มนวลและเป็นธรรมชาติ
ในขณะที่มนุษย์กำลังเดินตรงไปข้างหน้าและเริ่มที่จะทำการเลี้ยว
ก่อนที่จะเลี้ยวพวกเขาจะต้องเคลื่อนย้ายจุดศูนย์รวมมวลไปในทิศทางด้านในของวงเลี้ยว
ด้วยเทคโนโลยี i-WALK
ทำให้อาซิโมสามารถทำนายการเคลื่อนที่ครั้งต่อไปได้แบบทันทีทันใด
และทำการย้ายจุดศูนย์รวมมวลโดยการคาดการณ์ล่วงหน้า
ทำให้สามารถเคลื่อนที่ได้อย่างต่อเนื่องโดยปราศจากการหยุด
ทั้งระยะก้าวยังสามารถเปลี่ยนแปลงได้อย่างอิสระ
|