หุ่นยนต์สองขาที่สร้างขึ้นสามารถเดินรักษาสมดุลได้อย่างสมบูรณ์แบบ
E4 – E5 – E6
ค้นพบเทคโนโลยีในการเดินรักษาสมดุลของหุ่นยนต์
ทีมนักวิจัยของฮอนด้า ได้นำเสนอวิธีควบคุมการเดินรักษาสมดุลของ หุ่นยนต์
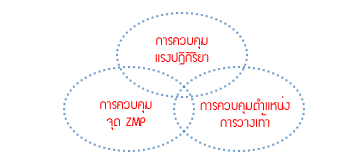
โดยวิธีดังกล่าวประกอบด้วยลักษณะการควบคุม 3 แบบ
ลักษณะการควบคุม 3 แบบ ที่ถูกใช้ควบคุมการเดินรักษาสมดุลของ หุ่นยนต์
กลไกการเดินถูกสร้างขึ้นได้อย่างสมบูรณ์แบบในหุ่นยนต์ทดลองรุ่น
E5 โดยหุ่นยนต์ดังกล่าวสามารถเดินรักษาสมดุลได้ทั้งพื้นเรียบ พื้นเอียง
รวมถึงสามารถเดินขึ้นลงบันไดได้
ในงานวิจัยขั้นต่อไปนั้น เป็นการเพิ่มส่วนของลำตัวเข้ามาติดตั้งเพื่อให้ หุ่นยนต์มีลักษณะคล้ายมนุษย์มากขึ้น
|